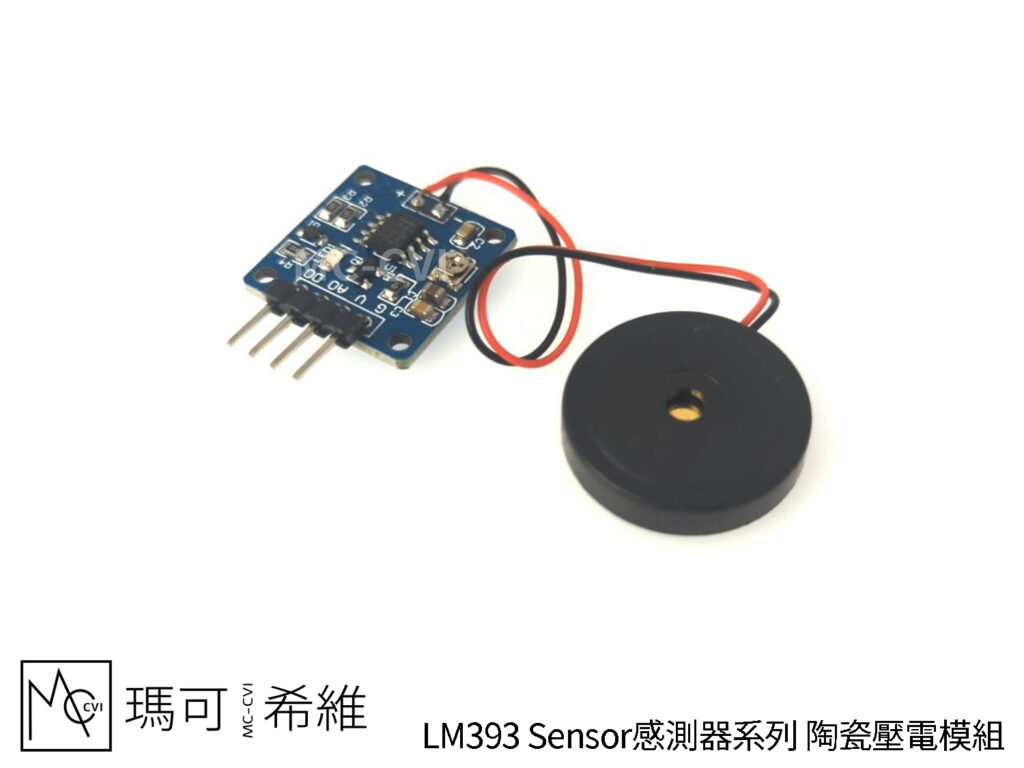
工作電壓:3V ~ 5V腳位說明:◎ VCC:供電端◎ GND:接地端◎ DO:數位訊號輸出◎ AO:類比訊號輸出◎ VR:DO電位變動的閥值
感測器 –
coming soon…
void setup() { } void loop() { }
★ LM393零件等級:商用級基本用途:Low-Power, Low-Offset Voltage, Dual Comparators工作電壓:±1V ~ ±18V驅動能力:<40mA工作電流(一般):0.4mA工作溫度:0℃ ~ 70℃