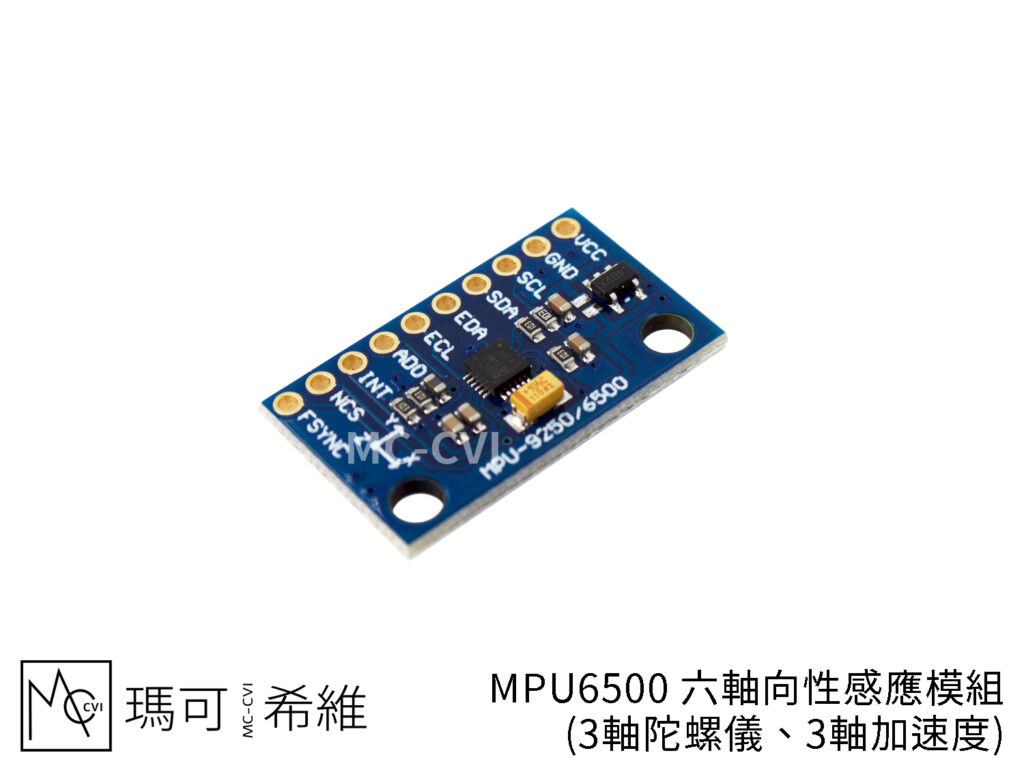
工作電壓:3V ~ 5.5V腳位說明:◎ VCC:供電端◎ GND:接地端◎ SDA:I2C Slave Data、SPI Data Input(SDI)◎ SCL:I2C Slave Clock、SPI Clock(SCLK)◎ EDA:I2C Master Data◎ ECL:I2C Master Clock◎ AD0:I2C Slave 地址選擇腳位、SPI Data Output(SDO)◎ INT:中斷腳位◎ NCS:SPI Chip Select(SCS)◎ FSYNC:幀數同步訊號
感測器 –
coming soon…
void setup() { } void loop() { }
★ MPU6500零件等級:工業級基本用途:Six-Axis (Gyro + Accelerometer) MEMS MotionTracking Devices工作電壓:2.375V ~ 3.46V工作電流(陀螺儀+加速度計):3.4mA工作電流(陀螺儀):3.2mA工作電流(加速度計):0.45mA工作電流(加速度計低功耗模式,0.98Hz更新頻率):7.27μA工作電流(加速度計低功耗模式,31.25Hz更新頻率):18.65μA工作電流(睡眠):6μA工作溫度:-40℃ ~ 85℃